| TP et cours Ensicaen |
| Les robot domestiques |
| Projet Ariane |
| liens |
Les
robots
domestiques
Caractéristique des
robots domestiques actuels
Du piano à la balle
de ping-pong
Invasion de la vie
courante par les robots
Réalités
économiques
et rêve d’enfant
Rentabilité des
robots domestiques
1.1
Introduction
Les robots sont enfin là… à portée de nos mains, de tout un chacun, chez soi. Les robots sont prêts à entrer dans nos maisons. Quelle est la réalité de ces annonces ? Quelles sont les capacités actuelles des robots. Avant de tenter de répondre à ces questions, nous allons éclaircir le concept de robot ? Ensuite, nous évoquerons les bases nécessaires des robots à leur intégration domestique. Enfin, nous finirons par un tour d’horizon des robots. Pour conclure, nous questionnerons la viabilité économique des robots et leur futur plus lointain.
1.2
Historique
Depuis longtemps, l’homme a su prolonger sa main d’une variété extraordinaire d’outils, qui lui ont permis de réaliser des actions impossibles ou, du moins, difficilement réalisables à mains nues. En particulier il a appris à fabriquer des objets en vue de satisfaire un besoin. L’omniprésence de l’objet technique dans le monde moderne et ses surprenantes capacités à évoluer ont fait naître une idée, un rêve : remplacer l’homme pour toutes les taches ingrates. Ceci reste encore de la fiction mais pour combien de temps encore ?
Voici comment d’une façon simpliste a vu le jour le concept de robot. Mais qu’entend on exactement par robot ? Les écrivains de science fiction ont été les premiers à s’intéresser aux robots. Le robot est un automate à l’apparence plus ou moins humaine capable de remplacer l’homme dans de nombreuses fonctions. De plus, il est capable d’évoluer avec une certaine autonomie et de résoudre des problèmes. Une autre définition plus réaliste nous dit que :« C’est un dispositif automatique et programmé qui peut remplacer l’homme pour effectuer certaines opérations. » Cependant nous ne sommes pas étrangers aux robots. Ils ont conquis depuis longtemps les usines où les taches répétitives dans la production montraient la limite de l’homme d’un point de vue productivité et coût de revient.
Bien que ces robots ne soient pas à même de résoudre des problèmes, ils accomplissent une suite d’actions totalement prédéfinies par un opérateur. Ils ne sont donc que des machines précises certes mais sans aucune « intelligence » . Ces robots industriels sont loin du rêve de départ. Ils sont comparables aux automates qui sont les ancêtres des robots. Les premières civilisations évoluées que sont les Grecs et les Egyptiens ont laissé des traces écrites sur des réalisations primitives : le rêve est né. Les mécaniciens et horlogers du moyen âge construisent des automates évolués qui font l’émerveillement des plus aisés, seuls à pouvoir s’offrir ce divertissement. Les références morphologiques se cantonnent aux animaux et aux hommes. On peut admirer les prouesses mécaniques des automates. Certains inventeurs ont déjà en tête des projets beaucoup plus ambitieux mais la mécanique ne peut créer d’intelligence à ces automates. Il faut donc attendre l’apparition de nouvelles technologies comme l’électronique pour voir des machines collecter des informations et réagir. Par exemple, ces machines réagissent à la lumière, la chaleur, le bruit, à la rencontre d’un obstacle. C’est là un développement essentiel : des machines qui réagissent à l’environnement extérieur. Les capteurs issus des technologies donnent aux futurs robots accès au monde sensible. Il manque encore l’essence qui différencie le robot de l’automate : l’intelligence. C’est là qu’intervient l’informatique. L’essor de l’informatique, la croissance de la puissance de calcul et la miniaturisation des puces, ces trois paramètres permettent d’étoffer les programmes qui gèrent les décisions des robots : on peut parler de naissance de l’intelligence artificielle.
On peut actuellement distinguer 3 types de robots :
- Une première génération sans capacité d’auto adaptation
- Une seconde possédant des capteurs de perception
- Une troisième équipée d’une intelligence artificielle
Mais où sont donc ces robots de troisième génération et à quels tâches les destine-t-on ? Pour l’heure actuelle, ces robots font l’objet de recherches. Cependant la commercialisation d’AIBO, le toutou de chez SONY, montre les récentes percées et la maîtrise technologique. L’usage actuellement envisagé pour ces robots s’oriente vers les tâches domestiques.
1.3
Caractéristique
des
robots domestiques actuels
1.3.1 Mobilité
Les robots industriels ne sont que très peu mobiles. Ils n’en ont en outre pas le besoin au contraire des robots domestiques. Le robot aspirant la poussière d’Electrolux serait bien inutile à attendre la poussière. Les modes de propulsion se sont orientés entre plusieurs catégories :
- Bipédie anthropomorphique
- Véhicule roulant
- Multiples pieds pour déplacement dans des zones accidentées
Le terrain dans lequel se déplacent ces robots ( un intérieur ) ne paraît pas receler de pièges et pourtant… un escalier devient vite un véritable défi. Il est vrai que l’autonomie de déplacement est une agréable chose : qui veut déplacer son robot aspirateur de pièces en pièces comme son aspirateur, quelle différence ? D’autres part, certains robots ne sont pas transportables. Le robot de Honda qui est très anthropomorphique pèse allègrement plus de 120kg : pauvre ménagère de moins de cinquante ans ! Il va falloir aussi aménager sa maison autrement. Le robot doit être capable d’ouvrir les portes, de pouvoir avoir accès aux instruments ménagers, d’avoir un site où il se recharge … Pour ce qui est de la bipédie, l’INRIA-Université de Poitiers va exposer à l’exposition universelle de Hanovre son projet bip. Ce n’est pas un robot à proprement parler mais sa base. Bip est un tronc avec deux jambes articulées propres à se déplacer dans un environnement commun à l’homme.
Le défi d’un robot bipède rejoint la complexité des capteurs, du traitement informatique temps réel, des actionneurs… La robotique unit beaucoup de disciplines pour donner un résultat probant. Le plus simple à mettre en place pour des robots reste encore des systèmes roulants. Cependant, leur emploi les limites à des environnements ou des tâches précises. Ils ne peuvent pas se déplacer sur des terrains accidentés ( problème de Mars pathfinder bloqué par un caillou ) ou alors ils doivent pouvoir se déplacer assez rapidement tel que l’aspirateur. Pour résoudre le problème des terrains difficiles, les robots munis de multiples pieds tels des arachnides peuvent se déjouer de tous les pièges.
De quel type de propulsion ont besoin les robots domestiques ? Il paraît certains que les robots bipèdes possèdent la préférence des chercheurs :
- Ils auront plus d’affinité avec les hommes
- Ils évolueront dans un environnement adapté.
1.3.2 Du piano à la balle de ping-pong
Les premières solutions au problème de la planification automatique de mouvements pour un robot remontent à la fin des années 1970. Sur quel principe reposent-elles? Celui-ci peut être très simplement imagé (les idées les plus fructueuses sont souvent les plus simples). Considérons deux équipes de déménageurs. L'une déménage l'appartement d'un pianiste virtuose, l'autre l'appartement d'un pongiste médaillé. Chacune doit résoudre son problème: le piano peut-il passer dans la cage d'escalier? La balle de ping-pong peut-elle passer dans la cage d'escalier? La seconde question est absurde tant la solution est immédiate. La réponse à la première serait tout aussi immédiate si l'on parvenait à transformer le piano en une balle de ping-pong. Cette transformation est possible !
Et oui, en supposant que le piano garde une orientation fixe, il est possible de le repérer dans le plan par les deux paramètres indiquant la position de son centre. Quelles sont les positions admissibles de ce point qui ne créent pas de collision entre le piano et les obstacles ?
Il suffit de «grossir» les obstacles par la taille du piano; on obtient ainsi un nouveau plan et de nouveaux obstacles. Dans ce nouvel environnement, le piano apparaît comme un point; le problème de déménagement du piano est dès lors aussi simple à résoudre que celui posé par la balle de ping-pong. Dans cet exemple, on a supposé que l'orientation du piano reste fixe. S'il avait eu une autre orientation, le paramètre d'orientation vient s'ajouter aux deux paramètres de position. À autant d'orientations correspondent autant de plans transformés. En fait, l'espace de toutes les positions et orientations admissibles ( on parle de configurations admissibles ) est un objet à trois dimensions.
Tout système mécanique dans son environnement, que ce soit un robot mobile ou un bras manipulateur, peut être représenté par un point dans son espace des configurations. Ainsi, le problème de la planification de mouvement d'un robot peut toujours être ramené au problème plus simple de la planification du mouvement pour un point ( notre balle de ping-pong ) dans l'espace des configurations. Le problème est plus simple; l'espace est bien sûr beaucoup plus compliqué.
Donc le calcul d'un chemin dans cet espace conduit à la solution: un chemin dans l'espace des configurations admissibles correspond à une variation continue des degrés de liberté du robot; il suffit de faire exécuter ces variations par l'intermédiaire des moteurs commandant les trois articulations du robot pour obtenir le mouvement. Comment une machine peut-elle calculer ce chemin?
Les
mouvements
réactifs
Considérons une particule métallique aimantée de polarité négative; plaçons dans son environnement un aimant de polarité positive, qui représente le but à atteindre, et plusieurs aimants de polarité négative, qui sont autant d'obstacles à éviter. La particule, soumise au champ magnétique résultant (on parle de champ de potentiel), se met en mouvement. Elle est attirée par le but de polarité positive et se dirige vers lui. Dès qu'elle s'approche près d'un obstacle, celui-ci, de polarité négative, tend à la dévier de sa trajectoire. Une fois l'obstacle contourné, la particule reprend son cheminement vers le but.
Cette méthode peut être programmée sur un calculateur. À chaque instant, le robot calcule la direction et l'intensité d'une force virtuelle qui l'attire vers le but. Les capteurs qui l'équipent fournissent la position et la distance des obstacles proches; il traduit ces informations en termes de forces virtuelles qui le repoussent. La composition des forces attractives et répulsives à chaque instant lui indique la direction à suivre. L'avantage de cette approche est qu'elle ne nécessite pas de plan de l'environnement. Nul besoin de calculer entièrement l'espace des configurations admissibles. Seule une information locale suffit. Elle peut être acquise lors de l'exécution du mouvement par l'intermédiaire de capteurs de proximité. La prise de décision est extrêmement rapide. Ainsi, un robot mobile équipé de détecteurs de proximité à ultrasons pourra dévier sa trajectoire au dernier moment pour contourner des obstacles imprévus, exactement comme le font les chauves-souris. Le système réagit par simple réflexe à une information sensorielle. Il reste que cette stratégie ne permet pas de résoudre toutes les situations. Le système peut se faire piéger dans des points d'équilibre qui ne correspondent pas à l'objectif. Ces points sont des minima locaux du champ de potentiel dont il est impossible de sortir par cette stratégie.
Les
mouvements
planifiés
Un robot qui utilise la méthode précédente ne sait pas analyser les raisons de sa défaillance, quand il ne parvient pas à atteindre l'objectif : échec de la stratégie ou inexistence d'un chemin conduisant au but. Une méthode de planification ne souffre pas une telle ambiguïté. Un planificateur de mouvement est un logiciel qui permet non seulement de calculer des chemins, mais également de conclure à leur non-existence quand le problème n'a pas de solution.
Reprenons l'exemple du piano. Décomposons l'espace des configurations admissibles en polygones convexes. L'intérêt d'un polygone convexe réside dans le fait que deux points quelconques situés à l'intérieur peuvent toujours être reliés par un segment de droite qui ne sort pas du polygone. Donc, si ce polygone est libre d'obstacles, le segment entre les deux points correspond à un chemin qui ne provoquera pas de collision. Établissons maintenant une carte, semblable à une carte routière, indiquant la possibilité de passage d'un polygone convexe à un polygone voisin (les deux polygones doivent posséder une frontière commune). Les polygones sont représentés par des points (des nœuds), un arc entre deux points indique le voisinage des deux polygones. La structure ainsi produite est appelée graphe.
Un mouvement sans collision entre les deux configurations existe si, et seulement si, il existe un chemin dans le graphe entre le polygone de départ et le polygone d'arrivée. Le graphe ayant un nombre fini de nœuds et un nombre fini d'arcs, un ordinateur peut décider de l'existence d'un chemin avec un nombre fini d'opérations. On a donc réussi à transformer un problème de nature continue (bouger dans un espace) en un problème de combinatoires qu'un ordinateur est capable de traiter. On dit que le problème est décidable grâce à un espace discret.
Rechercher un chemin dans un graphe fait partie des acquis de l'informatique. Si le robot trouve un chemin dans le graphe, il peut alors transformer ce chemin en une trajectoire à suivre: il lui suffit, par exemple, de joindre par un segment de droite les points médians du segment commun à deux polygones voisins sur le trajet; ces segments sont sans collision puisque les polygones sont convexes. Le problème est ainsi résolu.
La méthode ci-dessus (on parle d'algorithme) a été illustrée par un exemple simple, mais son principe peut être étendu à l'exploration d'espaces beaucoup plus complexes. Cet algorithme permet de décider s’il existe ou non une solution et de la calculer quand elle existe; ce groupe d’algorithme est dit complets. Néanmoins, la propriété de complétude a un coût. Plus l'espace est de dimension élevée, plus les algorithmes consomment des ressources en temps de calcul et en espace mémoire, un inconvénient rédhibitoire pour certaines applications.
Hasard et
mouvement
Reprenons la méthode précédente des potentiels. Lorsque le mouvement réactif conduit à une impasse, supposons que le robot décide d'effectuer un mouvement aléatoire, sans plus se préoccuper du but à atteindre. Il s'arrête au bout d'un certain temps, puis relance la méthode des potentiels pour atteindre l'objectif. S'il s'arrête à nouveau dans une impasse, il effectue un nouveau mouvement aléatoire, et ainsi de suite jusqu'à atteindre le but par la méthode des potentiels. Cette stratégie peut sembler a priori étrange et très inefficace. Mais son analyse formelle montre que le but sera atteint avec certitude. La seule inconnue est le temps nécessaire pour l'atteindre. Or, il apparaît que cette stratégie s'avère très efficace dans la plupart des situations. Elle permet même de résoudre des problèmes dans des espaces de très grandes dimensions que les algorithmes complets ne pouvaient pas résoudre en pratique par manque de ressources. Il reste quelques situations nécessitant un nombre trop important de marches aléatoires pour pouvoir conclure: on dit que cet algorithme est complet en probabilité. Il ne peut pas, en effet, décider de la non-existence d'une solution.
En pratique, le robot n'effectue pas les mouvements aléatoires, il les simule sur le calculateur qui le contrôle. Dès qu'il a trouvé un «chemin solution», il peut l'améliorer en supprimant les parties comprenant des mouvements inutiles.
Qu'elles soient
réactives ou
planifiées, ces
méthodes sont actuellement mises au point sur les robots
développés
dans les
laboratoires de recherche. C'est sur la base de leurs principes que les
robots
qui partageront demain notre quotidien auront la capacité de
décider de
leurs
mouvements. Ces recherches dépassent le cadre de la
robotique. Les
mêmes
algorithmes sont applicables, et appliqués, dans des
domaines très
variés et
parfois inattendus. En animation graphique, par exemple, ils permettent
de
calculer automatiquement le déplacement d'objets dans des
environnements
virtuels. Ces techniques équiperont les voitures du futur.
La xsara
citröen
embarque un ordinateur et un noyau Windows CE ( version
allégé prévu
pour les
systèmes embarqués ). L’utilisateur
peut profiter de trajets proposés
par la
voiture. Ces trajets sont calculés
d’après la circulation. Déjà
les
concurrents
annoncent des versions de leurs véhicules
possédants un système
embarqué.
1.3.3 Vous avez dit intelligent ?
Le propre des futurs robots sera l’intelligence artificielle. Mais cela n’est pas assuré pour tous. Il apparaît déjà une grosse différence entre les robots généralistes ou copiant des attitudes du monde vivant et les robots spécialisés. Ces derniers sont attelés à un travail précis qui ne demande pas d’inspiration, on pourrait rapprocher ces robots des automates ou encore des robots industriels. Un programme fixe gère leur comportement qui ne varie ostensiblement jamais même lorsqu’il rencontre un problème. C’est là leur limite. Même si pour l’instant ils sont les plus économiques, ils ne sont pas à même d’évoluer et leur obsolescence venant, ils seront supplanter.
La mise en place d’une intelligence artificielle dans un robot pose beaucoup de problèmes. Quelle peut être la complexité minimum de comportement pour un robot ? D’autant qu’il faut bien la limiter car le robot est limité par son autonomie et sa mobilité et le temps de réponse. De plus, son implémentation doit être évolutive avec les évolutions du robot et de son environnement. Le problème est donc de pouvoir avoir une sorte de système évolutif, rapide car le robot doit évoluer en temps réel et puissant. Le système d’exploitation doit être multithreads et doit supporter de multiprocesseurs.
Néanmoins, l’intelligence ne suffit pas, les robots vont devoir apprendre à faire face à des situations dont il n’ont aucune réaction implémenté. De telle situation sont appelés en anglais « deadlocks ». Certains proposent pour pouvoir se sortir de là d’implémenter des moyens de communication orale qui permettent d’interroger une tierce personne. La mise en place d’une forme d’intelligence présuppose une interaction avec les hommes.
Robot
programmable
LEGO a commercialisé un bloc intelligent qui est programmable par les utilisateurs. Ce bloque est relié à un PC via une liaison radio qui permet une mobilité du robot. On peut alors programmer son robot. En fait, la cellule intelligente charge son OS au démarrage et les programmes sélectionnés par l’utilisateur. Ces programmes peuvent être écrits par l’utilisateur. Ces programmes sont écrits en C++ ou en Visual Basic. LEGO fournit le support sur son site.
1.3.4 « Travail » des robots
Avoir un esclave dans l’antiquité était chose commune pour les classes aisées. Ils accomplissaient tout l’entretien domestique et le service de leur maître. Maintenant que l’humanité s’abstient de telles pratiques barbares ( enfin espérons le… ), les robots sont l’analogie moderne de ces esclaves. Leur vocation est bien le service des hommes. Comment peuvent-ils le faire ? Nous avons vu que les robots se présentent sous différentes formes et ne sont pas munis des même facultés d’analyse. Nous pouvons donc en déduire qu’ils n’ont pas été conçus dans la même optique. Certains robots ont des attributs particuliers qui leur permettent d’effectuer une ou plusieurs corvées domestiques. Ces robots pourraient être comparés à des appareils électroménagers hyper perfectionnés. Cependant la robotique permet d’être plus ambitieux.
Il existe des projets de robot d’aide à des personnes à mobilité réduite ou déficiente. Ceci permettrait de donner ou redonner une autonomie à ces personnes souvent obligés d’avoir recours à des aides à domicile ou de devoir le quitter. Ces robots nécessitent une interface très souple, une grande mobilité et disponibilité ( pas question de tomber en panne car ils n’ont pas pu s’entretenir tous seuls ). Les contraintes imposées ne sont pourtant pas insurmontables.
Les aides ménagers ne sont pas la seule optique des robots. Les actualités ont mis en évidence des robots d’un intérêt plus ludique. Cela paraît plus normal : on n’exige pas la même efficacité d’un divertissement. De plus, comme ces robots sont récents, ils bénéficient d’un engouement propre à la nouveauté. Les robots ludiques devraient tout de même rester. La percée dans les foyers n’est pas sans rappeler la micro-informatique qui est d’abord rentrée en tant que jeu plutôt qu’en outil professionnel. Les robots ludiques sont en fait les précurseurs et vont permettre aux générations futures un meilleur accueil vis à vis des hommes. En outre, leur rôle social n’est pas à négliger. Les robots sont des acteurs du foyer au sein duquel ils vont évoluer. Par leur interaction avec les divers membres de la famille et le besoin de chacun, il ne faut pas négliger leur travail social. Ils doivent pouvoir contenter chacun. Cela induit un autre problème : la reconnaissance des utilisateurs.
On peut encore imaginer que les futurs robots seront des intendants du foyer. Ils en ont toutes les possibilités :
- Contrôle des appareils ménagers
- Prévision des tâches
- Connaissance et interaction avec les membres de la famille
Ils risquent de devenir un membre de la famille tout comme les animaux domestiques hormis des responsabilités sur le bon fonctionnement de la vie quotidienne.
1.3.5 Interfaces et connections
L’avènement du tout numérique permet aux robots de pouvoir être interfacer avec leur environnement. Ils possèdent plusieurs sens :
· La vue
· L’ouie
· Le toucher
Regardons les capteurs mis en place actuellement :
- Deux caméras pour avoir une perception des distances et des formes
- Une caméra munie de capteur pour repérer les formes
- Capteur et émetteur d’onde radio ou d’ultrasons
Selon les capteurs mis en place, on comprend la stratégie et les capacités des robots. L’utilisation de deux caméras ressemble à notre vue : la stéréovision. Un androïde peut donc reconnaître les forme géométrique des objets qui sont à sa portée et aussi les distances. Ainsi il voit un monde en trois dimensions. Un robot muni d’une unique caméra ne peut mesurer les distances mais il utilise un autre capteur pour se faire tel qu’un capteur ultrasons. Le dernier type d’automate est dépourvu de caméra et donc n’a aucune analyse visuelle. On peut donc répartir en trois classes de robots :
· Un androïde pourra reconnaître, trier, manipuler des objets.
· Un robot sera autonome mais limiter dans la reconnaissance des formes
· Un automate ne se préoccupe guère des objets environnant
Reconnaissance
des
formes
Pour pouvoir interagir avec son environnement, les robots doivent pouvoir reconnaître les objets qu’ils les entourent. La vue joue un rôle prépondérant dans la capacité de distinction des objets. Cependant le traitement de l’image que nécessite la reconnaissance des formes géométrique élémentaire est gourmand en calcul.
La mise en place d’un système de vision pour les robots capable de reconnaître les formes n’est pas simple à mettre en place pratiquement. Les algorithmes de traitement de l’image sont connus mais le problème réside dans les temps de réponse. La couche logicielle qui doit assuré le traitement de l’image doit être temps réel et travailler en parallèle. Au vu des performances actuelles des processeurs, l’unité de calcul devrait être constituée d’une plate-forme multiprocesseur.
Regardons en détail le processus mis en œuvre pour la vision du robot :
1. le calibrage des caméras
2. l’exploitation des couleurs ou textures pour délimitation de zones
3. la construction d’une image 3D grâce à la stéréovision par corrélation des pixels
4. la détection de mouvement de l’objet ou du robot
Le chien AIBO ressent les caresses de son maître et agite la queue pour montrer sa satisfaction. Il semble que les laboratoire ont soigné les capacités sensorielles de ces robots domestiques appeler à se déplacer dans un environnement parfois totalement inconnue.
Comment allons nous communiquer avec ces robots ? S’ils sont au sein même de notre maison pour assurer que notre petit déjeuner soit prêt ou si nous devons lui demander que manque t il dans le frigidaire pour le repas du soir, quel médium va-t-on utiliser ? Il apparaît que les robots primitifs sont dépourvus d’une interface propre à leur intégration au sein de la famille. Utiliser un programme informatique ou même une télécommande peut paraître une solution simple à mettre en place mais peu conviviale pour les utilisateurs. La solution actuellement en cours de développement est la reconnaissance vocale. Il est vrai qu’on a du mal à imaginer un être intelligent dépourvu de paroles et de compréhension. La reconnaissance vocale n’est pas heureusement une technologie totalement inconnue. Il existe déjà beaucoup de travaux. Le vrai challenge devient l’apprentissage du langage et la manipulation de la grammaire. Les recherches sont actuellement orientées sur la linguistique et son implémentation logicielle.
La communication sous toutes ses formes est de nos jours au cœur de la société. Les infrastructures permettant une connexion à différents réseaux sont en place et de plus les différentes plates formes sont utilisables pour ce connecter à d’autres : téléphonie mobile, Internet, intranet domestique… Nous ne pouvons plus nous passer de ces instruments dans notre vie quotidienne. Dès lors, les robots ne peuvent s’en passer. De plus en tant qu’assistant de nos tâches, il doit pouvoir demander au frigidaire son stock, surveiller la température du logement, gérer d’autres appareils électroménagers… Là, le robot ne peut actuellement administrer le tout : un serveur est nécessaire pour commander le réseau domestique. De même si l’on veut commander un produit, consulter ses e-mails… les robots actuels seront compatibles avec les dernières normes de téléphonie et les protocoles réseaux. Il est sûr que le nombre d’informations à traiter que ce soit des données se rapportant à l’environnement physique ou bien à ses tâches domestiques ou même encore des données informatiques. Cela induit une puissance de traitement de l’information et de calcul. Les robots seront équipés d’une CPU ou plusieurs puissantes. Le volume de données à stocker risque aussi d’être important en rapport avec les capacités de mémoire et le flux de données. Rien que pour assurer son équilibre, Bip, le projet de l’INRIA, possède des capteurs de pressions sous les pieds en outre des capteurs ultrasons pour se repérer dans l’espace. La mise en œuvre d’application assurant le déplacement des robots dans l’espace ne devra pas accaparer la CPU du robot sinon elle limitera ces autres capacités.
1.4
Invasion de la vie
courante par les robots
1.4.1 Mais où sont les robots ?
Récemment, au salon du jouet de Tokyo, des « aquaroids » ont été présentés. Ces simulacres aquatiques sous forme de crabes, de crevettes, de poissons et même de méduses sont destinées à remplacer les animaux dans les aquariums. On est proche de Blade Runner. Il faut tout de même reconnaître la prouesse technique ainsi que la modération du prix ( 800 francs l’unité, on est loin des 30 000 francs du chien de Sony ) . Cet exemple farfelu montre que les robots ont un champ d’action illimité. Ils devraient conquérir d’ici peu toute la terre ; pour l’espace, cela a déjà commencé.
En fait, l’entrée des robots dans notre vie nous choque car cette intrusion se fait non pas comme celui d’un outil, d’un quelconque instrument. Ce nouvel élément est interactif et peu décider de lui-même ce qui blesse notre habitude de pouvoir sur notre environnement direct. Mais les robots sont biens des atouts à exploiter. Voyons un exemple où le robot est l’unique possibilité que nous ayons.
1.4.2 De Mars à la Terre
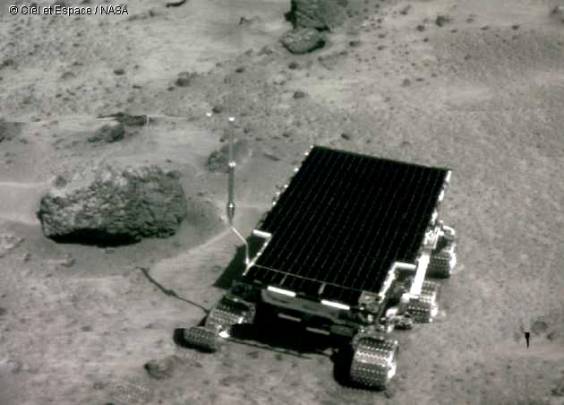
La plate-forme mobile Sojourner larguée sur Mars le 4 juillet 1997 dans le cadre de la mission Pathfinder sur la planète Mars peut fournir un bon exemple des progrès récents dans le domaine de la robotique.
Le but de ce véhicule automatique était d'effectuer une exploration du sol martien aux alentours de la zone d'atterrissage. Explorer une planète inconnue, voilà qui donne une autre image de la robotique, trop souvent associée et réduite soit aux gains de productivité de l'industrie manufacturière, dont elle est historiquement issue, soit, à l'opposé, aux humanoïdes de science-fiction. Dans la mission spatiale américaine, il ne s'agissait pas de remplacer l'homme (l'homme n'est jamais allé sur Mars), mais bien de prolonger ses capacités par l'intermédiaire de machines agissant sous son contrôle. De plus, les moyens mis en œuvre pour fabriquer ce robot était des plus raisonnables. Les pièces étaient issues de composants commercialisés en grande quantité.
Plus l'ambition est grande, plus les robots doivent être dotés de capacités élaborées de perception (évaluer sa situation dans l'environnement), de prise de décision (organiser ses actions pour atteindre un objectif) et d'actions dans un monde physique. Perception, décision et action sont les trois principales composantes des robots qui fonctionnent déjà en laboratoire. Les progrès rapides en technologie de l'information permettaient il y a dix ans d'envisager déjà des applications telles que l'exploration planétaire. Aujourd'hui, nous en sommes au stade des tout premiers résultats. Ils apparaissent dans ce domaine et dans d'autres, aussi variés que l'exploration de fonds marins, l'exploration de l'Antarctique, la médecine (assistance au geste chirurgical), l'aide aux personnes handicapées (fauteuil automatisé), l'agriculture, l'armement (char automatisé) et le «désarmement» (engins de déminage), les transports et les services.
Parmi les progrès récents, il en est un qui est capital: la maîtrise du mouvement. Ce qui distingue la mission Pathfinder sur Mars des précédentes, c'est qu'un engin conçu par l'homme s'est déplacé pour la première fois sur Mars avec un but précis (l'exploration). Les temps de communication avec la planète Mars sont tels (dans le meilleur des cas, une vingtaine de minutes est nécessaire pour transmettre un ordre depuis la station de contrôle terrestre) que la machine doit décider seule des mouvements qu'elle doit effectuer pour remplir la tâche qui lui est assignée. Si la plate-forme Sojourner n'intégrait pas toutes les solutions présentées ci-après, ses répliques restées sur terre en laboratoire en sont déjà capables.
1.4.3 Domaine à conquérir
Conquérir note maison n’est pas l’ultime objectif des robots actuellement. Les sciences les plus en pointe en sont les plus demandeurs.
chirurgie
non
invasive
«À petite incision, petit chirurgien», a-t-on pu entendre naguère dans les salles d'opération. Cette affirmation, qui traduisait, pour certains, la recommandation de pratiquer de larges incisions permettant de bien voir la zone à opérer, est actuellement battue en brèche. À une époque où le confort et l'esthétique sont rois, et le temps d'anesthésie limité dans la mesure du possible, un nouveau défi s'offre au chirurgien: réduire l'agressivité opératoire.
Réduire
l'agression
chirurgicale
L'agression commence par la taille et la disgrâce des incisions. Elles sont, à coup sûr, le stigmate le plus flagrant, mais conditionnent aussi les douleurs et l'impotence
fonctionnelle conséquente. Cette perte de fonction plus ou moins transitoire entraîne une hospitalisation, un arrêt de l'activité sociale, professionnelle et de loisir, dont les durées sont d'autant moins acceptables qu'elles sont prolongées. La chirurgie non invasive est une des réponses à cette demande du patient.
Les avancées techniques lui procurent un vaste champ d'applications. D'une part, le développement de systèmes optiques a permis à l’œil de l'opérateur de se glisser dans presque tous les recoins de l'organisme par les voies naturelles ou des abords punctiformes (cicatrice réduite à un point). D'autre part, la miniaturisation et la qualité de l'instrumentation ont rendu possibles les interventions chirurgicales par ces voies étroites. Leur inconvénient originel fut de restreindre la vision de l'acte au seul opérateur qui maniait le système optique. Les collaborateurs tenaient un rôle d'aide passif et aveugle. Le progrès technologique a créé des caméras dont le poids et la taille sont réduits et qui supportent les procédures de désinfection indispensables à l'asepsie, souci constant du chirurgien. Les gestes opératoires sont retransmis sur un écran de télévision. L'équipe partage l'information et participe mieux à l'acte, dans l'intérêt du patient : c'est l'avènement de la vidéo-chirurgie. La route fut bien longue qui aboutit à ce concept. L'évolution fut de plus en plus rapide.
ET oui
grâce à des
petits robots !
Par une instrumentation qui permettait de réduire la taille des incisions, ou par leur habileté technique, les chirurgiens ont pratiqué des interventions conventionnelles par des abords de plus en plus restreints
Autre supériorité de cette technique, la taille de l'optique et des instruments permet de s'insinuer dans des passages étroits, inaccessibles à la vue et à la main du chirurgien.
Néanmoins la technique chirurgicale endoscopique est plus difficile: le chirurgien doit développer la coordination entre l’œil et la main, car la vue et la manipulation sont dissociées par la projection sur l'écran de télévision, et l'optique agrandit les images. La vision peut être directe (droit devant), mais aussi latérale, suivant un angle de plus de 100° permettant de regarder, «derrière le coin», des structures normalement cachées par d'autres organes.
L'opérateur doit
maîtriser
parfaitement sa
technique, connaître les possibilités et limites
des instruments
utilisés et
respecter scrupuleusement les mesures de préparation, les
indications
et
contre-indications.
Les voies
de la
sagesse
S'agissant de chirurgie non invasive, des médias ont pu proclamer que certains gestes se réalisaient maintenant «sans opérer». L'image est simplificatrice et réconfortante, mais tout les mérites reviennent à une technique qui a fait toutes ses preuves.
En effet se sont ces petits robots qui ont permis aux chirurgiens de faire ces grands exploits, et la science promet encore plus.
1.5
Réalités
économiques et
rêve d’enfant
Si les capacités des robots ne sont plus à mettre en doute, il faut savoir si les investissements lourds menés par beaucoup de consortiums internationaux sont justifiés.
1.5.1 Rentabilité des robots domestiques
Certaines entreprises ont déjà commencé à penser au moyen de vendre leur robot. S’il est acquis que le prix des robots sera assez important, les canaux de distribution habituelle risque de ne pas être adapter. Certains pensent que les concessionnaires automobiles sont les plus à même pour les vendre. Car ils sont habitués à vendre à crédit… On voit déjà les foyers s’endettant pour posséder le fin du fin de la technologie. Mais la concurrence est rude et a déjà commencé. Les Japonais sont pour des raisons historiques les plus avancés. La commercialisation de AIBO par Sony montre à quel point il est important d’occuper le segment. En réalité, Sony a vendu à perte ce robot pour des raisons évidentes de marketing. Le défi technologique sera donc aussi de réduire les coûts avant même de pouvoir augmenter les capacités de ces robots. Bien que les technologies utilisées par les robots commencent à être très répandues, ils sont gourmands de pièce coûteuse tel que les capteurs sensoriels ( capteur de pression, tactile, ultrasons ) . Une réduction des coûts de ces éléments et une meilleure maîtrise de la fabrication des robots sont un élément clé de la réussite industrielle des robots.
1.5.2 Sont-ils si nécessaires ?
Nous avons su nous passer des robots. Cependant le futur ne se fera pas sans eux. Nous n’échapperons pas aux robots. Il est sûr que dans un premier temps ils seront un luxe. Les industriels vont facilement imposer les robots comme un élément incontournable du confort moderne. C’est ce qu’on peut appeler créer un marché. Certes, ils vont être utiles pour les cas précisés précédemment tels que les personnes handicapées, âgées… Cependant le commun des mortels aura son ou ses robots ; ils feront le ménage, les courses, joueront avec les enfants. Bref, ils s’avèreront vite indispensable et s’insérer dans le noyaux familiale. Or, toute intrusion signifie qu’ils vont prendre toute ou en partie la place occupée par un autre individu : l’animal domestique par exemple. Je ne suis pas aussi optimiste comme xxxxx a pu l’être en décrivant l’arrivée de AIBO dans les foyers nippons. Car si l’engouement et la réunion de la famille est effective, il s’agit avant tout de la découverte d’un nouveau jouet. La banalisation apportera ses effets pervers. Connaître les répercussions des robots peut paraître un peu prématuré. Mais il est sûr qu’ils vont induire des changements de mœurs. Et leur incidence sur notre comportement ne va pas forcément nous rendre plus humain et moins robot…
1.5.3 Quel futur pour les robots ?
Si il est pratiquement sûr que les robots possèderont une intelligence artificielle, qu’ils collaboreront étroitement avec les hommes, quel est leur avenir ? Leur intelligence ne leur donne pas une conscience mais si un jour, on leur fournit… Comment pourra-t-on distinguer un être humain d’un robot ? Le concept de robot définit auparavant implique que le robot est une sorte d’esclave de son travail. Or, toute personne consciente essaiera de s’affranchir de son état d’esclave. Il y a des contradictions auxquelles devront répondre les concepteurs de robot.